


Η ιατρική ρομποτική χρησιμοποιείται εδώ και περίπου 30 χρόνια. Η ρομποτική χειρουργική αποκαλείται «επαναστατική» από πολλούς χειρουργούς που την εκτιμούν για τα πολλά πλεονεκτήματά της, τόσο πραγματικά όσο και πιθανά. Η προέλευσή του οφείλεται σε μεγάλο βαθμό στις αδυναμίες των τεχνολογιών ελάχιστα επεμβατικής χειρουργικής (MIS) που προηγήθηκαν.
Ρομποτική χειρουργική
Σήμερα, η χοληδόχος κύστη αφαιρείται τακτικά από έναν χειρουργό σε μια ήπειρο από έναν ασθενή σε μια άλλη, χρησιμοποιώντας ρομποτική τηλεχειρουργική. Η φωνητική ενεργοποίηση ρομποτικών βραχιόνων και η απτική ανάδραση προσφέρει στους χειρουργούς την εντολή που αναζητούν πάνω από την ίδια τη χειρουργική επέμβαση.
Ζητήματα με ελάχιστα επεμβατική χειρουργική
Η ελάχιστα επεμβατική χειρουργική περιορίζεται από την απώλεια των αισθήσεων που σχετίζονται με την αφή και τη δύναμη, οι οποίες είναι τόσο κρίσιμες για τον προσδιορισμό της ακρίβειας των χειρουργικών επεμβάσεων.
Η επιδεξιότητα της κίνησης περιορίζεται από τον φυσικό περιορισμό του οργάνου, το οποίο έχει μόνο τέσσερις βαθμούς κίνησης σε αντίθεση με τους ανθρώπινους καρπούς και το χέρι, που έχουν επτά. Φυσιολογικοί τρόμοι μεταφέρονται επίσης γρήγορα στο χειρουργικό πεδίο από το άκαμπτο λαπαροσκοπικό όργανο.
Όλοι αυτοί οι παράγοντες οδήγησαν στην ανάπτυξη χειρουργικών ρομπότ, ξεκινώντας με το Puma 560 το 1985, ένα ρομπότ που έκανε νευροχειρουργικές βιοψίες και λίγο αργότερα, τη διουρηθρική εκτομή του προστάτη. Καθώς η τηλεχειρουργική έγινε περιοχή εντατικής έρευνας στο Ερευνητικό Κέντρο Ames της Εθνικής Διοίκησης Αεροπορίας και Διαστήματος (NASA), η χειρουργική ρομποτική άρχισε να προχωρά δραματικά. Πρώτοι εμφανίστηκαν οι θήκες και οι θέσεις τοποθέτησης της κάμερας, όπως το Automated Endoscopic System for Optimal Positioning (AESOP), μια φωνητική βάση κάμερας, το 1990.


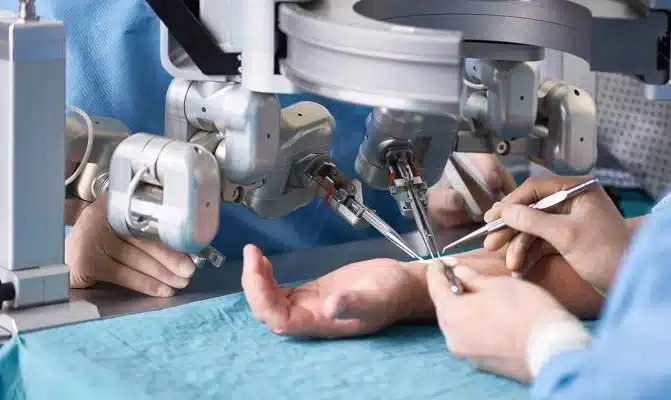
Στη συνέχεια ήρθαν τα ενεργά ιατρικά ρομπότ, όπως το σύστημα da Vinci (Intuitive Surgical Inc.), ένα προηγμένο σύστημα master-slave, με πολλαπλούς ρομποτικούς βραχίονες ή χειριστές που ελέγχονται εξ αποστάσεως από έναν χειρουργό από μια κονσόλα. Αυτά τα συστήματα χρησιμοποιούν μικροσκοπικούς χειρουργικούς βραχίονες, σε αντίθεση με τους χειρουργικούς βραχίονες ενός εκατοστού του Puma 560, αποφεύγοντας την ανάγκη απόσυρσης των πλευρών της τομής. Τα χαρακτηριστικά Endo-Wrist των χειριστικών βραχιόνων παρέχουν επίσης επτά βαθμούς ελευθερίας.
Παραδοσιακά συστήματα περιστρέφονται γύρω από το τροκάρ εισαγωγής, το οποίο περιορίζει την επιδέξια διαχείριση των οργάνων και μπορεί να προκαλέσει ακούσια βλάβη σε παρακείμενες ζωτικές δομές. Το μεγάλο μέγεθος και το κόστος αυτών των συστημάτων είναι απαγορευτικό στις περισσότερες περιπτώσεις για τη συνήθη υιοθέτηση της ρομποτικής χειρουργικής.
Τα ρομπότ λαπαρο-ενδοσκοπικής χειρουργικής μονής θέσης (LESS) εισάγουν την κάμερα και πολλά όργανα μέσω μιας μόνο τομής, κατά προτίμηση του ομφάλιου, οπότε δεν υπάρχει ουλή. Μικρότερα συστήματα όπως το σύστημα SurgiBot-SPIDER (Single-Port Instrument Delivery Extended Research) επιτρέπουν τη ρομποτική χειρουργική με σημαντικά μικρότερο κόστος, αλλά δεν έχουν λάβει ακόμη την έγκριση του FDA.
Τα νεότερα ρομπότ κατασκευάζονται από μαλακά, εύκαμπτα και παραμορφώσιμα υλικά. Η χρήση βιοσυμβατών μαλακών υλικών, υπερελαστικών υλικών και τρισδιάστατων εκτυπωμένων μαλακών πλαστικών, όπως τα ελαστομερή πυριτίου, επιτρέπουν μεγαλύτερη ασφάλεια. Αυτά επιτρέπουν αλλαγές στο ρομποτικό σχήμα και τις μηχανικές ιδιότητες σε απόκριση στην αφή, ενισχύοντας έτσι τη μεγαλύτερη εγγενή ασφάλειά τους. Τα νεότερα ρομπότ επιτρέπουν επίσης επιμήκυνση για τον συντονισμό της ακριβούς θέσης του ρομπότ και μεγαλύτερη ευελιξία του λαιμού του οργάνου.


Η μοντελοποίηση ιδιοτήτων ιστού προσφέρει απτική ανάδραση. Η ευκαμψία και ο έλεγχος της ακαμψίας είναι βασικές πτυχές των νεότερων ρομποτικών χειρουργικών συστημάτων που αναδύονται σήμερα. Τα νεότερα εύκαμπτα ρομπότ αντιλαμβάνονται τη δύναμη που ασκείται από την ανακατασκευή του σχήματος, με την ακαμψία του προωθούμενου άκρου να ελέγχεται από την τάση. Αυτό επιτρέπει την ενεργή ρύθμιση του ωφέλιμου φορτίου.
Η ικανότητα επίτευξης μεταβλητής ακαμψίας σε διαφορετικά τμήματα ενός ενδοσκοπίου θα μπορούσε να επιτρέψει στο ρομπότ να κινείται ευέλικτα μέσα στον αυλό ενός μαλακού οργάνου, αλλά να μην αναστρέφεται μόνο του όταν απαιτείται για να διαπραγματευτεί μια απότομη στροφή, για παράδειγμα. Με αυτές τις εξελίξεις, φθηνότερα και ασφαλέστερα ρομπότ μπορούν να σχεδιαστούν για κάθε ασθενή και κάθε επέμβαση, καθιστώντας τα μη επεμβατικά και πιο οικονομικά.
Πνευματικοί σωλήνες χρησιμοποιήθηκαν για τη δημιουργία ρομπότ που μπορούν να επιμηκυνθούν εκατοντάδες φορές το αρχικό τους μήκος, να μπορούν να ελίσσονται σε στενούς χώρους και να κινούνται γύρω από γωνίες ή μπλοκ. Αυτά τα βιομιμητικά ρομπότ διαμορφώνονται σε φυτά και μπορούν να χρησιμοποιηθούν για χειρισμό εξ αποστάσεως.